Configurationの意味を調べると、
『配置』、『配列』、『構成』、『環境設定』、『形状』、『地形』、『輪郭』、『外形』・・・などの意味があるそうです。
この場合ですと、『環境設定』がしっくりきますかね。
さて、使用する機体はブラシモーターのTiny Whoopです。

FC(フライトコントローラー)は『BeeRotor TinyBeeF3 Brushed Flight Controller』を、プロポはFutabaを使用しています。
では、最初からみていきましょう!!
Mixer
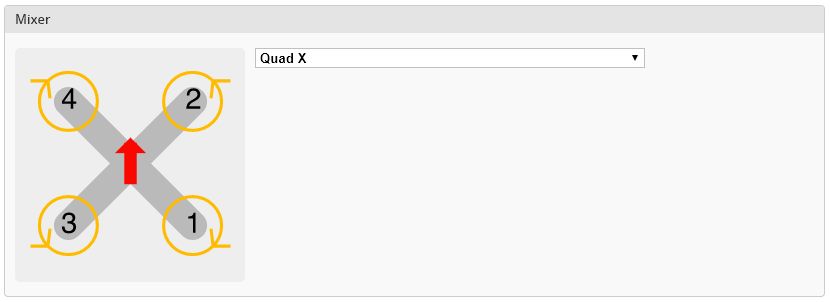
Mixerは『Quad X』にしておきます。
System configuration
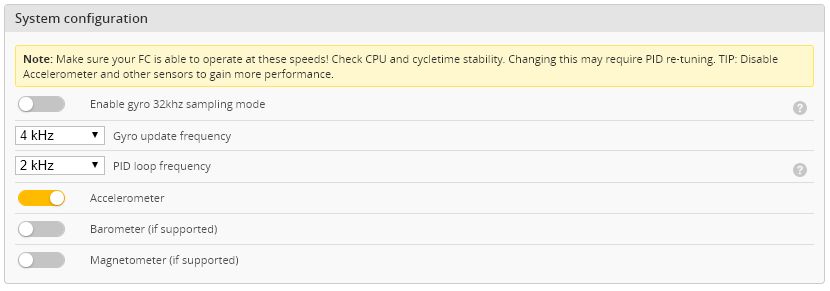
『System configuration』は
『Gyro update frequency』を『4kHz』に、
『PID loop frequency』を『2kHz』に、
『Accelerometer』を『ON』に設定しています。
ESC/Motor Features

『ESC/Motor protocol』は、今回はブラシモーターなので『BRUSHED』
『Motor PWM speed Separated from PID speed』は『ON』にしています。
『Motor PWM frequency』は『16000』
『MOTOR STOP』は『OFF』
『Disarm motors regardless of throttle value』は『ON』
『Minimum Throttle』は『1070』
『Maximum Throttle』は『2000』
『Minimum Command』は『1000』です。
Board and Sensor Alignment

ここは、FC(フライトコントローラー)を左右に回旋させずに前後まっすぐ搭載した場合は、『0』で大丈夫です。
Accelerometer Trim
![]()
これは、サブトリムを使わずにスロットル操作で機体の調整をした場合、勝手に数値が入りますので、そのままで大丈夫です。
例えばホバリング時に、勝手に右に移動してしまう場合、スロットルを一番下に下げた状態で、ロールを右もしくは左に切ると、FCが点滅するのでその回数で調整します。
Receiver
![]()
ここでは『PPM RX input』にしてあります。
Other Features
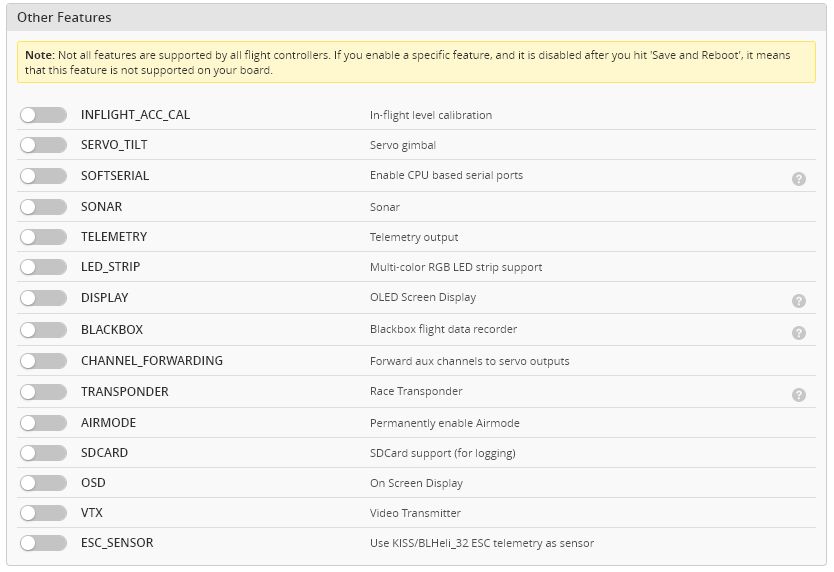
この機体の場合、ただ飛ばすだけなので、何も『ON』にしていません。
すべて『OFF』です。
Battery Voltage

ココの数値は、バッテリーに関する警告音をいつ鳴らすかという設定ですね。
『Minimum Cell Voltage』を2.9に
『Maximum Cell Voltage』を4.5に
『Warning Cell Voltage』を3.2にしてあります。
以上ですが、私の設定なのでご参考までにお願いします。